
Unity3D基于陀螺仪实现VR相机功能
更新时间:2020年04月15日 08:53:25 作者:一缕残阳
这篇文章主要为大家详细介绍了Unity3D基于陀螺仪实现VR相机功能,文中示例代码介绍的非常详细,具有一定的参考价值,感兴趣的小伙伴们可以参考一下
Unity自带陀螺仪功能,今天就利用陀螺仪实现一个VR相机功能。步骤如下:
1、打开Unity,创建一个新的C#脚本GyroController.cs,并挂在MainCamera游戏对象上,如图:

代码如下:
using UnityEngine;
using System.Collections;
public class GyroController : MonoBehaviour
{
// Fields
private readonly Quaternion baseIdentity = Quaternion.Euler(90f, 0f, 0f);
private Quaternion baseOrientation = Quaternion.Euler(90f, 0f, 0f);
private Quaternion baseOrientationRotationFix = Quaternion.identity;
private Quaternion calibration = Quaternion.identity;
private Quaternion cameraBase = Quaternion.identity;
private bool debug = true;
public static bool gyroAvaiable;
private bool gyroEnabled = true;
private Quaternion gyroInitialRotation;
public static bool gyroOff;
private Quaternion initialRotation;
private readonly Quaternion landscapeLeft = Quaternion.Euler(0f, 0f, -90f);
private readonly Quaternion landscapeRight = Quaternion.Euler(0f, 0f, 90f);
private const float lowPassFilterFactor = 0.1f;
private Quaternion offsetRotation;
private Quaternion referanceRotation = Quaternion.identity;
private readonly Quaternion upsideDown = Quaternion.Euler(0f, 0f, 180f);
// Methods
private void AttachGyro()
{
this.gyroEnabled = true;
this.ResetBaseOrientation();
this.UpdateCalibration(true);
this.UpdateCameraBaseRotation(true);
this.RecalculateReferenceRotation();
}
private void Awake()
{
gyroAvaiable = SystemInfo.supportsGyroscope;
}
private static Quaternion ConvertRotation(Quaternion q)
{
return new Quaternion(q.x, q.y, -q.z, -q.w);
}
private void DetachGyro()
{
this.gyroEnabled = false;
}
private Quaternion GetRotFix()
{
return Quaternion.identity;
}
private void RecalculateReferenceRotation()
{
this.referanceRotation = Quaternion.Inverse(this.baseOrientation) * Quaternion.Inverse(this.calibration);
}
private void ResetBaseOrientation()
{
this.baseOrientationRotationFix = this.GetRotFix();
this.baseOrientation = this.baseOrientationRotationFix * this.baseIdentity;
}
protected void Start()
{
Input.gyro.enabled = true;
base.enabled = true;
this.AttachGyro();
this.initialRotation = base.transform.localRotation;
this.gyroInitialRotation = Input.gyro.attitude;
}
private void Update()
{
gyroOff = PlayerPrefs.GetInt("gyro-off") == 1;
if (this.gyroEnabled )
{
base.transform.localRotation = Quaternion.Slerp(base.transform.localRotation, this.cameraBase * (ConvertRotation(this.referanceRotation * Input.gyro.attitude) * this.GetRotFix()), 0.5f);//0.1f
}
}
private void UpdateCalibration(bool onlyHorizontal)
{
if (onlyHorizontal)
{
Vector3 toDirection = (Vector3) (Input.gyro.attitude * -Vector3.forward);
toDirection.z = 0f;
if (toDirection == Vector3.zero)
{
this.calibration = Quaternion.identity;
}
else
{
this.calibration = Quaternion.FromToRotation((Vector3) (this.baseOrientationRotationFix * Vector3.up), toDirection);
}
}
else
{
this.calibration = Input.gyro.attitude;
}
}
private void UpdateCameraBaseRotation(bool onlyHorizontal)
{
if (onlyHorizontal)
{
Vector3 forward = base.transform.forward;
forward.y = 0f;
if (forward == Vector3.zero)
{
this.cameraBase = Quaternion.identity;
}
else
{
this.cameraBase = Quaternion.FromToRotation(Vector3.forward, forward);
}
}
else
{
this.cameraBase = base.transform.rotation;
}
}
}
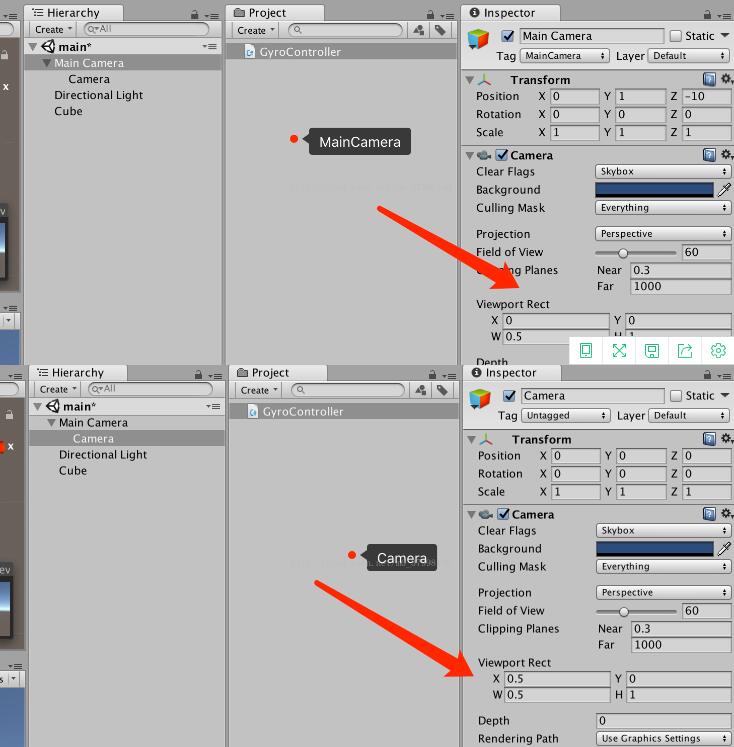
2、在相机MainCamera下创建一个新的Camera相机,并改变两个相机的Viewport Rect属性,以将屏幕均分,如图:
3、在场景中创建一个Cube,效果如图:

4、保存场景,打包成apk即可。即可使用手机陀螺仪控制相机旋转了。
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持脚本之家。
您可能感兴趣的文章:
相关文章
 这篇文章介绍了C#写入XML文档的方法,文中通过示例代码介绍的非常详细。对大家的学习或工作具有一定的参考借鉴价值,需要的朋友可以参考下2022-04-04
这篇文章介绍了C#写入XML文档的方法,文中通过示例代码介绍的非常详细。对大家的学习或工作具有一定的参考借鉴价值,需要的朋友可以参考下2022-04-04 double.Epsilon 是C#中的一个静态字段,表示 double 数据类型的最小可表示的正数值,这篇文章主要介绍了C#中的静态字段double.Epsilon的相关知识,需要的朋友可以参考下2024-01-01
double.Epsilon 是C#中的一个静态字段,表示 double 数据类型的最小可表示的正数值,这篇文章主要介绍了C#中的静态字段double.Epsilon的相关知识,需要的朋友可以参考下2024-01-01 webservice的 发布一般都是使用WSDL(web service descriptive language)文件的样式来发布的,在WSDL文件里面,包含这个webservice暴露在外面可供使用的接口。今天我们来详细讨论下如何动态调用以及读取解析返回结果2015-06-06
webservice的 发布一般都是使用WSDL(web service descriptive language)文件的样式来发布的,在WSDL文件里面,包含这个webservice暴露在外面可供使用的接口。今天我们来详细讨论下如何动态调用以及读取解析返回结果2015-06-06 这篇文章主要介绍了WinForm的延时加载控件,很实用的技巧,在C#程序设计中有着比较广泛的应用,需要的朋友可以参考下2014-08-08
这篇文章主要介绍了WinForm的延时加载控件,很实用的技巧,在C#程序设计中有着比较广泛的应用,需要的朋友可以参考下2014-08-08 如果你想玩转C# 里面多线程,工厂模式,生产者/消费者,队列等高级操作,就可以和我一起探索这个强大的线程安全提供阻塞和限制功能的C#神器类BlockingCollection吧2023-02-02
如果你想玩转C# 里面多线程,工厂模式,生产者/消费者,队列等高级操作,就可以和我一起探索这个强大的线程安全提供阻塞和限制功能的C#神器类BlockingCollection吧2023-02-02 这篇文章主要介绍了C#调用存储过程的方法,结合实例形式详细分析了各种常用的存储过程调用方法,包括带返回值、参数输入输出等,需要的朋友可以参考下2016-06-06
这篇文章主要介绍了C#调用存储过程的方法,结合实例形式详细分析了各种常用的存储过程调用方法,包括带返回值、参数输入输出等,需要的朋友可以参考下2016-06-06 本文主要介绍了C#线程同步的相关知识。具有很好的参考价值,下面跟着小编一起来看下吧2017-01-01
本文主要介绍了C#线程同步的相关知识。具有很好的参考价值,下面跟着小编一起来看下吧2017-01-01 这篇文章主要介绍了C#通过流写入数据到文件的方法,涉及C#通过字节流读写文件的相关技巧,需要的朋友可以参考下2015-07-07
这篇文章主要介绍了C#通过流写入数据到文件的方法,涉及C#通过字节流读写文件的相关技巧,需要的朋友可以参考下2015-07-07 在本篇文章里小编给大家整理的是关于C#字体池技术实现代码详解内容,有需要的朋友们可以学习下。2019-11-11
在本篇文章里小编给大家整理的是关于C#字体池技术实现代码详解内容,有需要的朋友们可以学习下。2019-11-11 目前的工作是需要手机查找附近N米以内的商户,致想法是已知一个中心点,一个半径,求圆包含于圆抛物线里所有的点,经纬度是一个点,半径是一个距离,不能直接加减,下面提供C#的解决方法2013-12-12
目前的工作是需要手机查找附近N米以内的商户,致想法是已知一个中心点,一个半径,求圆包含于圆抛物线里所有的点,经纬度是一个点,半径是一个距离,不能直接加减,下面提供C#的解决方法2013-12-12










最新评论