
pytorch visdom安装开启及使用方法
更新时间:2021年04月21日 08:59:44 作者:yilyil
这篇文章主要介绍了pytorch visdom安装开启及使用方法,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友们下面随着小编来一起学习学习吧
安装
conda activate ps pip install visdom
激活ps的环境,在指定的ps环境中安装visdom
开启
python -m visdom.server
浏览器输入红框内的网址
使用
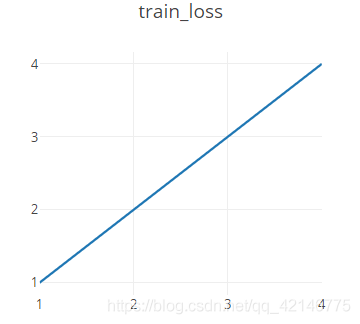
1. 简单示例:一条线
from visdom import Visdom # 创建一个实例 viz=Visdom() # 创建一个直线,再把最新数据添加到直线上 # y x二维两个轴,win 创建一个小窗口,不指定就默认为大窗口,opts其他信息比如名称 viz.line([1,2,3,4],[1,2,3,4],win="train_loss",opts=dict(title='train_loss')) # 更一般的情况,因为下面y x数据不存在,只是示例 # append 添加到原来的后面,不然全部覆盖掉 # viz.line([loss.item()],[global_step],win="train_loss",update='append')
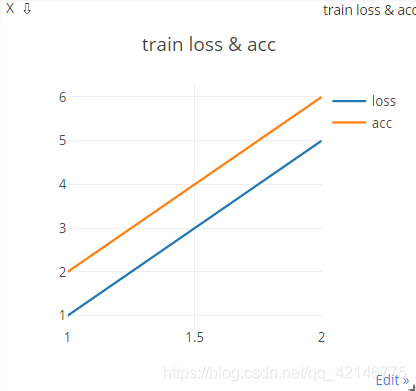
2. 简单示例:2条线
下面主要是[[y1],[y2]],[x] 两条映射,legend就是线条名称
from visdom import Visdom viz=Visdom() viz.line([[1,2],[5,6]],[1,2],win="loss_acc",opts=dict(title='train loss & acc',legend=['loss','acc']))
3. 显示图片
from visdom import Visdom viz=Visdom() # data 是一个batch viz.image(data.view(-1,1,28,28),win='x') viz.text(str(pred.datach().cpu().numpy()),win='pred',opts=dict(title='pred'))
4. 手写数字示例
动画效果图如下
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transforms
from visdom import Visdom
batch_size=200
learning_rate=0.01
epochs=10
train_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=True, download=True,
transform=transforms.Compose([
transforms.ToTensor(),
# transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=batch_size, shuffle=True)
test_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=False, transform=transforms.Compose([
transforms.ToTensor(),
# transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=batch_size, shuffle=True)
class MLP(nn.Module):
def __init__(self):
super(MLP, self).__init__()
self.model = nn.Sequential(
nn.Linear(784, 200),
nn.LeakyReLU(inplace=True),
nn.Linear(200, 200),
nn.LeakyReLU(inplace=True),
nn.Linear(200, 10),
nn.LeakyReLU(inplace=True),
)
def forward(self, x):
x = self.model(x)
return x
device = torch.device('cuda:0')
net = MLP().to(device)
optimizer = optim.SGD(net.parameters(), lr=learning_rate)
criteon = nn.CrossEntropyLoss().to(device)
viz = Visdom()
viz.line([0.], [0.], win='train_loss', opts=dict(title='train loss'))
viz.line([[0.0, 0.0]], [0.], win='test', opts=dict(title='test loss&acc.',
legend=['loss', 'acc.']))
global_step = 0
for epoch in range(epochs):
for batch_idx, (data, target) in enumerate(train_loader):
data = data.view(-1, 28*28)
data, target = data.to(device), target.cuda()
logits = net(data)
loss = criteon(logits, target)
optimizer.zero_grad()
loss.backward()
# print(w1.grad.norm(), w2.grad.norm())
optimizer.step()
global_step += 1
viz.line([loss.item()], [global_step], win='train_loss', update='append')
if batch_idx % 100 == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
epoch, batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item()))
test_loss = 0
correct = 0
for data, target in test_loader:
data = data.view(-1, 28 * 28)
data, target = data.to(device), target.cuda()
logits = net(data)
test_loss += criteon(logits, target).item()
pred = logits.argmax(dim=1)
correct += pred.eq(target).float().sum().item()
viz.line([[test_loss, correct / len(test_loader.dataset)]],
[global_step], win='test', update='append')
viz.images(data.view(-1, 1, 28, 28), win='x')
viz.text(str(pred.detach().cpu().numpy()), win='pred',
opts=dict(title='pred'))
test_loss /= len(test_loader.dataset)
print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
test_loss, correct, len(test_loader.dataset),
100. * correct / len(test_loader.dataset)))
到此这篇关于pytorch visdom安装开启及使用方法的文章就介绍到这了,更多相关pytorch visdom使用内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!
相关文章
 这篇文章主要介绍了python 动态获取当前运行的类名和函数名的方法,分别介绍使用内置方法、sys模块、修饰器、inspect模块等方法,需要的朋友可以参考下2014-04-04
这篇文章主要介绍了python 动态获取当前运行的类名和函数名的方法,分别介绍使用内置方法、sys模块、修饰器、inspect模块等方法,需要的朋友可以参考下2014-04-04
Python简单获取网卡名称及其IP地址的方法【基于psutil模块】
这篇文章主要介绍了Python简单获取网卡名称及其IP地址的方法,结合实例形式分析了Python基于psutil模块针对本机网卡硬件信息的读取操作简单使用技巧,需要的朋友可以参考下2018-05-05 小编想实现这样一个功能:将输入字符串中的字母 “i” 变成字母 “p”。想着很简单,怎么实现呢?下面小编给大家带来了Python实现字符串中某个字母的替代功能,感兴趣的朋友一起看看吧2019-10-10
小编想实现这样一个功能:将输入字符串中的字母 “i” 变成字母 “p”。想着很简单,怎么实现呢?下面小编给大家带来了Python实现字符串中某个字母的替代功能,感兴趣的朋友一起看看吧2019-10-10 这篇文章主要介绍了python使用requests库爬取拉勾网招聘信息的实现,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友们下面随着小编来一起学习学习吧2020-11-11
这篇文章主要介绍了python使用requests库爬取拉勾网招聘信息的实现,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友们下面随着小编来一起学习学习吧2020-11-11 今天小编就为大家分享一篇django删除表重建的实现方法,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧2019-08-08
今天小编就为大家分享一篇django删除表重建的实现方法,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧2019-08-08 这篇文章主要介绍了python中Flask框架简单入门实例,以一个hello程序简单分析了Flask框架的使用技巧,需要的朋友可以参考下2015-03-03
这篇文章主要介绍了python中Flask框架简单入门实例,以一个hello程序简单分析了Flask框架的使用技巧,需要的朋友可以参考下2015-03-03 这篇文章介绍了Python中的文件系统模块pathlib库,文中通过示例代码介绍的非常详细。对大家的学习或工作具有一定的参考借鉴价值,需要的朋友可以参考下2022-05-05
这篇文章介绍了Python中的文件系统模块pathlib库,文中通过示例代码介绍的非常详细。对大家的学习或工作具有一定的参考借鉴价值,需要的朋友可以参考下2022-05-05 这篇文章主要介绍了关于Python-pip安装失败问题及解决方案,具有很好的参考价值,希望对大家有所帮助。如有错误或未考虑完全的地方,望不吝赐教2023-02-02
这篇文章主要介绍了关于Python-pip安装失败问题及解决方案,具有很好的参考价值,希望对大家有所帮助。如有错误或未考虑完全的地方,望不吝赐教2023-02-02 这篇文章主要介绍了Python处理时间日期坐标轴过程详解,当日期数据作为图表的坐标轴时通常需要特殊处理,应为日期字符串比较长,容易产生重叠现象,需要的朋友可以参考下2019-06-06
这篇文章主要介绍了Python处理时间日期坐标轴过程详解,当日期数据作为图表的坐标轴时通常需要特殊处理,应为日期字符串比较长,容易产生重叠现象,需要的朋友可以参考下2019-06-06 这篇文章主要介绍了python中显存回收问题解决方法,文章提供一个实例问题和处理的思路,具有一定的参考价值,需要的小伙伴可以参考一下2021-12-12
这篇文章主要介绍了python中显存回收问题解决方法,文章提供一个实例问题和处理的思路,具有一定的参考价值,需要的小伙伴可以参考一下2021-12-12










最新评论