
pytorch中F.avg_pool1d()和F.avg_pool2d()的使用操作
F.avg_pool1d()数据是三维输入
input维度: (batch_size,channels,width)channel可以看成高度
kenerl维度:(一维:表示width的跨度)channel和输入的channel一致可以认为是矩阵的高度
假设kernel_size=2,则每俩列相加求平均,stride默认和kernel_size保持一致,越界则丢弃(下面表示1,2列和3,4列相加求平均)
input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float()
print(input)
m = F.avg_pool1d(input,kernel_size=2)
m
tensor([[[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.],
[0., 0., 0., 1., 1.],
[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.]]])
tensor([[[1.0000, 1.0000],
[1.0000, 1.0000],
[0.0000, 0.5000],
[1.0000, 1.0000],
[1.0000, 1.0000]]])
假设kenerl_size=3,表示前3列相加求平均,后面的不足3列丢弃
input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float()
print(input)
m = F.avg_pool1d(input,kernel_size=3)
m
tensor([[[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.],
[0., 0., 0., 1., 1.],
[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.]]])
tensor([[[1.],
[1.],
[0.],
[1.],
[1.]]])
input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float()
print(input)
m = F.avg_pool1d(input,kernel_size=4)
m
tensor([[[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.],
[0., 0., 0., 1., 1.],
[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.]]])
tensor([[[1.0000],
[1.0000],
[0.2500],
[1.0000],
[1.0000]]])
假设stride=1每次移动一个步伐
input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float()
print(input)
m = F.avg_pool1d(input,kernel_size=2,stride=1)
m
tensor([[[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.],
[0., 0., 0., 1., 1.],
[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.]]])
tensor([[[1.0000, 1.0000, 1.0000, 1.0000],
[1.0000, 1.0000, 1.0000, 1.0000],
[0.0000, 0.0000, 0.5000, 1.0000],
[1.0000, 1.0000, 1.0000, 1.0000],
[1.0000, 1.0000, 1.0000, 1.0000]]])
input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float()
print(input)
m = F.avg_pool1d(input,kernel_size=4,stride=1)
m
tensor([[[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.],
[0., 0., 0., 1., 1.],
[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.]]])
tensor([[[1.0000, 1.0000],
[1.0000, 1.0000],
[0.2500, 0.5000],
[1.0000, 1.0000],
[1.0000, 1.0000]]])
F.avg_pool2d()数据是四维输入
input维度: (batch_size,channels,height,width)
kenerl维度:(二维:表示width的跨度)channel和输入的channle一致,如果数据是三维,则channel为1.(如果只写一个数n,kenerl=(n,n))
stride默认和kenerl一致,这是个二维的,所以在height和width上均和kenerl一致,越界同样丢弃。
跟cnn卷积一致
input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float()
print(input.size())
print(input)
m = F.avg_pool2d(input,kernel_size=(4,4))
m
torch.Size([1, 5, 5])
tensor([[[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.],
[0., 0., 0., 1., 1.],
[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.]]])
tensor([[[0.8125]]])
input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float()
print(input.size())
print(input)
m = F.avg_pool2d(input,kernel_size=(4,4),stride=1)
m
torch.Size([1, 5, 5])
tensor([[[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.],
[0., 0., 0., 1., 1.],
[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.]]])
tensor([[[0.8125, 0.8750],
[0.8125, 0.8750]]])
如果求列的平均kenerl=(1,5),此时默认stride=(1,5)
input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float()
print(input.size())
print(input)
m = F.avg_pool2d(input,kernel_size=(1,5))
m
torch.Size([1, 5, 5])
tensor([[[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.],
[0., 0., 0., 1., 1.],
[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.]]])
tensor([[[1.0000],
[1.0000],
[0.4000],
[1.0000],
[1.0000]]])
如果求行的平均kenerl=(5,1),此时默认stride=(5,1),用卷积的概念取思考
input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float()
print(input.size())
print(input)
m = F.avg_pool2d(input,kernel_size=(5,1))
m
torch.Size([1, 5, 5])
tensor([[[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.],
[0., 0., 0., 1., 1.],
[1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1.]]])
tensor([[[0.8000, 0.8000, 0.8000, 1.0000, 1.0000]]])
对于四维的数据,channel默认和输入一致
input=torch.randn(10,3,4,4) m=F.avg_pool2d(input,(4,4)) print(m.size()) torch.Size([10, 3, 1, 1])
补充:PyTorch中AdaptiveAvgPool函数解析
自适应池化(AdaptiveAvgPool1d):
对输入信号,提供1维的自适应平均池化操作 对于任何输入大小的输入,可以将输出尺寸指定为H*W,但是输入和输出特征的数目不会变化。
torch.nn.AdaptiveAvgPool1d(output_size) #output_size:输出尺寸
对输入信号,提供1维的自适应平均池化操作 对于任何输入大小的输入,可以将输出尺寸指定为H*W,但是输入和输出特征的数目不会变化。
# target output size of 5 m = nn.AdaptiveAvgPool1d(5) input = autograd.Variable(torch.randn(1, 64, 8)) output = m(input)
自适应池化(AdaptiveAvgPool2d):
class torch.nn.AdaptiveAvgPool2d(output_size)
对输入信号,提供2维的自适应平均池化操作 对于任何输入大小的输入,可以将输出尺寸指定为H*W,但是输入和输出特征的数目不会变化。
参数:
output_size: 输出信号的尺寸,可以用(H,W)表示H*W的输出,也可以使用耽搁数字H表示H*H大小的输出
# target output size of 5x7 m = nn.AdaptiveAvgPool2d((5,7)) input = autograd.Variable(torch.randn(1, 64, 8, 9)) # target output size of 7x7 (square) m = nn.AdaptiveAvgPool2d(7) input = autograd.Variable(torch.randn(1, 64, 10, 9)) output = m(input)
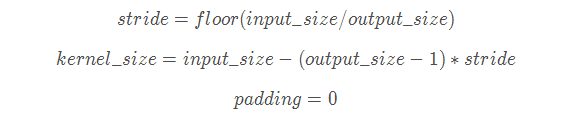
自适应池化的数学解释:

以上为个人经验,希望能给大家一个参考,也希望大家多多支持脚本之家。
- Pytorch自定义Dataset和DataLoader去除不存在和空数据的操作
- pytorch Dataset,DataLoader产生自定义的训练数据案例
- PyTorch实现重写/改写Dataset并载入Dataloader
- 一文弄懂Pytorch的DataLoader, DataSet, Sampler之间的关系
- PyTorch 解决Dataset和Dataloader遇到的问题
- PyTorch 如何自动计算梯度
- 我对PyTorch dataloader里的shuffle=True的理解
- pytorch 带batch的tensor类型图像显示操作
- 解决pytorch下只打印tensor的数值不打印出device等信息的问题
- Pytorch 如何查看、释放已关闭程序占用的GPU资源
- pytorch中的squeeze函数、cat函数使用
- Pytorch数据读取之Dataset和DataLoader知识总结
相关文章
 这篇文章主要为大家详细介绍了python监控文件或目录变化的实现代码,感兴趣的小伙伴们可以参考一下2016-06-06
这篇文章主要为大家详细介绍了python监控文件或目录变化的实现代码,感兴趣的小伙伴们可以参考一下2016-06-06 这篇文章主要介绍了深入剖析Python的列表和元组,Python有4个内建的数据结构,它们可以统称为容器,因为它们实际上是一些“东西”组合而成的结构,而这些“东西”,可以是数字、字符甚至列表,或是它们的组合,需要的朋友可以参考下2023-07-07
这篇文章主要介绍了深入剖析Python的列表和元组,Python有4个内建的数据结构,它们可以统称为容器,因为它们实际上是一些“东西”组合而成的结构,而这些“东西”,可以是数字、字符甚至列表,或是它们的组合,需要的朋友可以参考下2023-07-07 作为一个django使用的新手,在做练手项目中对联表查询感觉比较生疏,最近两天整理了一些连表查询应用场景和使用方法以及无法使用django中ORM操作的原生查询,对Django 联表查询操作感兴趣的朋友跟随小编一起看看吧2023-09-09
作为一个django使用的新手,在做练手项目中对联表查询感觉比较生疏,最近两天整理了一些连表查询应用场景和使用方法以及无法使用django中ORM操作的原生查询,对Django 联表查询操作感兴趣的朋友跟随小编一起看看吧2023-09-09 理解和处理XML数据在Python中是一项常见任务,xmltodict便是一个Python库,用于将XML数据解析为易于处理的Python字典,下面我们就来学习一下xmltodict库的具体使用吧2023-11-11
理解和处理XML数据在Python中是一项常见任务,xmltodict便是一个Python库,用于将XML数据解析为易于处理的Python字典,下面我们就来学习一下xmltodict库的具体使用吧2023-11-11 下面小编就为大家分享一篇DataFrame 将某列数据转为数组的方法,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧2018-04-04
下面小编就为大家分享一篇DataFrame 将某列数据转为数组的方法,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧2018-04-04 这篇文章主要为大家详细介绍了python实现微信远程控制电脑的方法,具有一定的参考价值,感兴趣的小伙伴们可以参考一下2018-02-02
这篇文章主要为大家详细介绍了python实现微信远程控制电脑的方法,具有一定的参考价值,感兴趣的小伙伴们可以参考一下2018-02-02 这篇文章主要介绍了python中的sort方法,需要的朋友可以参考下2014-07-07
这篇文章主要介绍了python中的sort方法,需要的朋友可以参考下2014-07-07 这篇文章主要介绍了python中如何设置list步长,具有很好的参考价值,希望对大家有所帮助。如有错误或未考虑完全的地方,望不吝赐教2022-05-05
这篇文章主要介绍了python中如何设置list步长,具有很好的参考价值,希望对大家有所帮助。如有错误或未考虑完全的地方,望不吝赐教2022-05-05 这篇文章主要介绍了pandas进行时间数据的转换和计算时间差并提取年月日,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友们下面随着小编来一起学习学习吧2019-07-07
这篇文章主要介绍了pandas进行时间数据的转换和计算时间差并提取年月日,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友们下面随着小编来一起学习学习吧2019-07-07 这篇文章主要介绍了Python延时操作实现方法,结合实例形式分析了Python基于sched库与time库实现延时操作的方法,需要的朋友可以参考下2018-08-08
这篇文章主要介绍了Python延时操作实现方法,结合实例形式分析了Python基于sched库与time库实现延时操作的方法,需要的朋友可以参考下2018-08-08










最新评论