
Deepsort + Yolo 实现行人检测和轨迹追踪的方法
引言
行人检测是近年来计算机视觉领域的研究热点,同时也是目标检测领域中的难点。其目的是识别和定位图像中存在的行人,在许多领域中都有广泛的应用。交通安全方面,无人驾驶汽车通过提前检测到行人及时避让来避免交通事故的发生;安防保护方面,通过行人检测来防止可疑人员进入;公共场所管理方面,通过行人检测统计人流量数据,优化人力物力等资源的分配。
对于目标检测的方法,从2013年Ross Girshick提出R-CNN开始,人们在短短几年内相继提出Fast R-CNN、Faster R-CNN、Mask R-CNN、SSD、YOLO等算法,其中两步检测的目标检测方法(R-CNN系列算法)需要先产生大量候选框之后再用卷积神经网络对候选框进行分类和回归处理;单步检测的方法(SSD、YOLO系列算法)则直接在卷积神经网络中使用回归的方法一步就预测出目标的位置以及目标的类别。虽然两步检测的目标检测方法在大多数的场景下精确率更高,但是它需要分两个步骤进行,因此,这种方法将耗费大量的时间成本和昂贵的硬件成本,不适合对视频文件进行实时的检测。而YOLO系列的网络速度更快,可以适应实时视频的检测,泛化能力更强。
对于人员跟踪,2016年Alex Bewley提出了简单在线实时跟踪算法,这种算法把传统的卡尔曼滤波和匈牙利算法结合到一起, 能在视频帧序列中很好地进行跨检测结果的关联, 而且它的速度比传统的算法快20倍左右,可以快速地对目标检测反馈的数据进行处理。
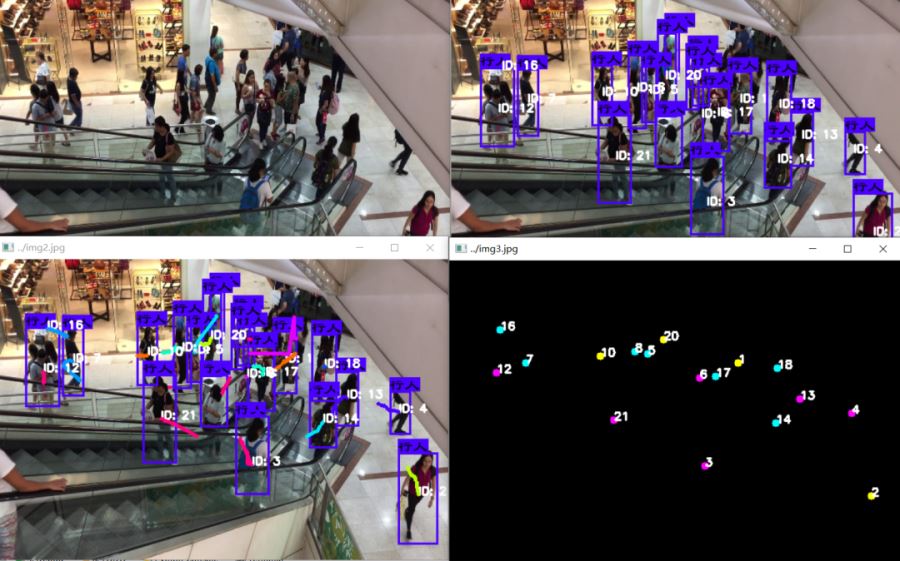
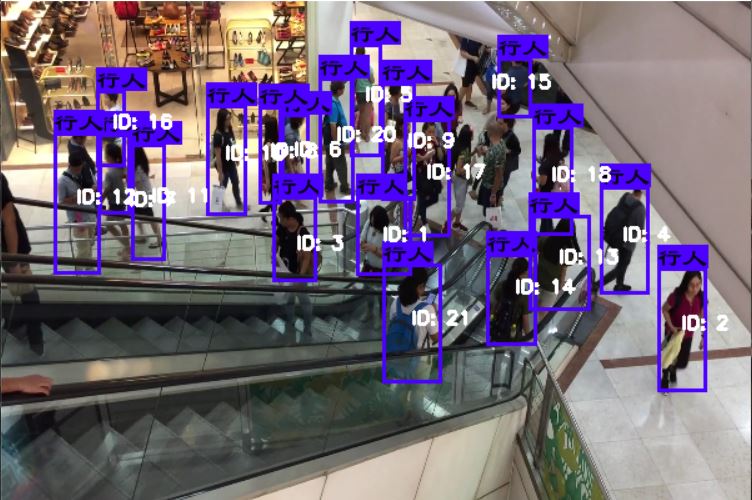
故本项目通过采用深度学习方法实现YOLO算法行人检测和deepsort算法对人员定位的和轨迹跟踪。其最终实现效果如下图可见:
基本介绍
1.1 环境要求
本次环境使用的是python3.6.5+windows平台。主要用的库有:
opencv模块。在计算机视觉项目的开发中,opencv作为较大众的开源库,拥有了丰富的常用图像处理函数库,采用C/C++语言编写,可以运行在Linux/Windows/Mac等操作系统上,能够快速的实现一些图像处理和识别的任务。
pillow模块。PIL是理想的图像存档和批处理应用程序。您可以使用库创建缩略图,在文件格式、打印图像等之间进行转换。它提供了广泛的文件格式支持、高效的内部表示和相当强大的图像处理功能。核心图像库是为快速访问以几种基本像素格式存储的数据而设计的。为通用图像处理工具提供了坚实的基础。
Scipy库。Scipy是一个用于数学、科学、工程领域的常用软件包,可以处理插值、积分、优化、图像处理、常微分方程数值解的求解、信号处理等问题。它用于有效计算Numpy矩阵,使Numpy和Scipy协同工作,高效解决问题。
keras模块。Keras是一个由Python编写的开源人工神经网络库,可以作为Tensorflow、Microsoft-CNTK和Theano的高阶应用程序接口,进行深度学习模型的设计、调试、评估、应用和可视化 。
1.2 算法设计
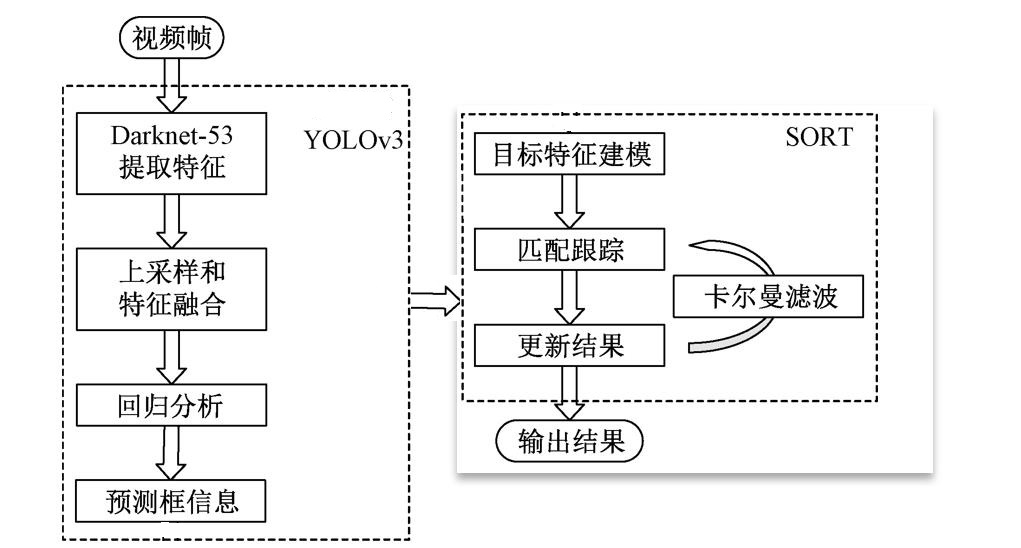
使用卷积神经网络对视频中的行人进行检测和跟踪。视频帧输入之后首先进入YOLOv3目标检测的网络,经过Darknet-53提取特征;其次,进行上采样和特征融合,再进行回归分析;再次,把得出的预测框信息输入SORT算法进行目标特征建模,匹配和跟踪;最后,输出结果。下图为算法流程设计图:
![]()
行人检测
2.1 YOLO行人检测
常见的两阶段检测首先是使用候选区域生成器生成的候选区集合,并从每个候选区中提取特征,然后使用区域分类器预测候选区域的类别。而YOLO作为单阶段检测器,则不用生成候选区域,直接对特征图的每个位置上的对象进行分类预测,效率更高。
在这里使用labelme标注行人数据集,然后通过搭建好的YOLO算法产生模型并进行训练即可。
def yolo_body(inputs, num_anchors, num_classes):
"""Create YOLO_V3 model CNN body in Keras."""
darknet = Model(inputs, darknet_body(inputs))
x, y1 = make_last_layers(darknet.output, 512, num_anchors*(num_classes+5))
x = compose(
DarknetConv2D_BN_Leaky(256, (1,1)),
UpSampling2D(2))(x)
x = Concatenate()([x,darknet.layers[152].output])
x, y2 = make_last_layers(x, 256, num_anchors*(num_classes+5))
x = compose(
DarknetConv2D_BN_Leaky(128, (1,1)),
UpSampling2D(2))(x)
x = Concatenate()([x,darknet.layers[92].output])
x, y3 = make_last_layers(x, 128, num_anchors*(num_classes+5))
return Model(inputs, [y1,y2,y3])
2.2 Deepsort行人跟踪
行人多目标跟踪算法设计的步骤如下:
(1) 检测阶段:目标检测算法会分析每一个输入帧,并识别属于特定类别的对象,给出分类和坐标。
(2) 特征提取/运动轨迹预测阶段:采用一种或者多种特征提取算法用来提取表观特征,运动或者交互特征。此外,还可以使用轨迹预测器预测该目标的下一个位置。
(3) 相似度计算阶段:表观特征和运动特征可以用来计算两个目标之间的相似性。
(4) 关联阶段:使用计算得到的相似性作为依据,将属于同一目标的检测对象和轨迹关联起来,并给检测对象分配和轨迹相同的 ID。
使用卡尔曼滤波类跟踪的估计状态系统和估计的方差或不确定性。用于预测。
这里dist_thresh为距离阈值。当超过阈值时,轨道将被删除,并创建新的轨道;Max_frames_to_skip为允许跳过的最大帧数对于跟踪对象未被检测到;max_trace_length为跟踪路径历史长度;trackIdCount为每个轨道对象的标识。
def Update(self, detections):
if (len(self.tracks) == 0):
for i in range(len(detections)):
track = Track(detections[i], self.trackIdCount)
self.trackIdCount += 1
self.tracks.append(track)
N = len(self.tracks)
M = len(detections)
cost = np.zeros(shape=(N, M))
for i in range(len(self.tracks)):
for j in range(len(detections)):
try:
diff = self.tracks[i].prediction - detections[j]
distance = np.sqrt(diff[0][0]*diff[0][0] +
diff[1][0]*diff[1][0])
cost[i][j] = distance
except:
pass
cost = (0.5) * cost
assignment = []
for _ in range(N):
assignment.append(-1)
row_ind, col_ind = linear_sum_assignment(cost)
for i in range(len(row_ind)):
assignment[row_ind[i]] = col_ind[i]
un_assigned_tracks = []
for i in range(len(assignment)):
if (assignment[i] != -1):
if (cost[i][assignment[i]] > self.dist_thresh):
assignment[i] = -1
un_assigned_tracks.append(i)
pass
else:
self.tracks[i].skipped_frames += 1
del_tracks = []
综合结果显示
将YOLO行人检测和deepsort算法结合,并通过设置基本阈值参数控制轨迹预测的欧式距离。通过搭建本项目可应用于城市商业街道、人行道、校园道路场景,使用其得出的人员流动数据,帮助公共交通和安全管理。最终得到的使用效果如下:
track_colors = get_colors_for_classes(max_colors)
result = np.asarray(image)
font = cv2.FONT_HERSHEY_SIMPLEX
result0 = result.copy()
result1=result.copy()
img_position=np.zeros([result.shape[0],result.shape[1],3])
if (len(centers) > 0):
tracker.Update(centers)
for i in range(len(tracker.tracks)):
if (len(tracker.tracks[i].trace) > 1):
x0, y0 = tracker.tracks[i].trace[-1][0][0], tracker.tracks[i].trace[-1][1][0]
cv2.putText(result0, "ID: "+str(tracker.tracks[i].track_id-99), (int(x0), int(y0)), font, track_id_size,
(255, 255, 255), 2)
cv2.putText(result1, "ID: " + str(tracker.tracks[i].track_id - 99), (int(x0), int(y0)), font,
track_id_size,
(255, 255, 255), 2)
color_random = tracker.tracks[i].track_id % 9
cv2.circle(img_position, (int(x0), int(y0)), 1, track_colors[color_random], 8)
cv2.putText(img_position, str(tracker.tracks[i].track_id - 99), (int(x0), int(y0)), font,
track_id_size,
(255, 255, 255), 2)
result0=result0.copy()
for j in range(len(tracker.tracks[i].trace) - 1):
x1 = tracker.tracks[i].trace[j][0][0]
y1 = tracker.tracks[i].trace[j][1][0]
x2 = tracker.tracks[i].trace[j + 1][0][0]
y2 = tracker.tracks[i].trace[j + 1][1][0]
clr = tracker.tracks[i].track_id % 9
distance = ((x2 - x1) ** 2 + (y2 - y1) ** 2) ** 0.5
if distance < max_point_distance:
cv2.line(result1, (int(x1), int(y1)), (int(x2), int(y2)),
track_colors[clr], 4)
result1=result1.copy()

完整代码:
链接: https://pan.baidu.com/s/1cJ6dgcEHOVGXvfg-ON3IrQ
提取码: f5y9
到此这篇关于Deepsort + Yolo 实现行人检测和轨迹追踪的文章就介绍到这了,更多相关Deepsort Yolo 行人检测内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!
相关文章
 这篇文章主要介绍了浅谈Python编程中3个常用的数据结构和算法,小编觉得挺不错的,现在分享给大家,也给大家做个参考。一起跟随小编过来看看吧2019-04-04
这篇文章主要介绍了浅谈Python编程中3个常用的数据结构和算法,小编觉得挺不错的,现在分享给大家,也给大家做个参考。一起跟随小编过来看看吧2019-04-04 这篇文章主要介绍了bluepy 一款python封装的BLE利器简单介绍,bluepy 是github上一个很好的蓝牙开源项目, 其主要功能是用python实现linux上BLE的接口。,需要的朋友可以参考下2019-06-06
这篇文章主要介绍了bluepy 一款python封装的BLE利器简单介绍,bluepy 是github上一个很好的蓝牙开源项目, 其主要功能是用python实现linux上BLE的接口。,需要的朋友可以参考下2019-06-06 这篇文章主要介绍了flask post获取前端请求参数的三种方式总结,具有很好的参考价值,希望对大家有所帮助。如有错误或未考虑完全的地方,望不吝赐教2022-12-12
这篇文章主要介绍了flask post获取前端请求参数的三种方式总结,具有很好的参考价值,希望对大家有所帮助。如有错误或未考虑完全的地方,望不吝赐教2022-12-12 今天小编就为大家分享一篇基于python批量处理dat文件及科学计算方法详解,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧2018-05-05
今天小编就为大家分享一篇基于python批量处理dat文件及科学计算方法详解,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧2018-05-05 随机密码生成器是一种常见的工具,用于生成强密码,下面这篇文章主要给大家介绍了关于Python中生成随机密码的多种超实用实例,文中通过代码介绍的非常详细,需要的朋友可以参考下2024-05-05
随机密码生成器是一种常见的工具,用于生成强密码,下面这篇文章主要给大家介绍了关于Python中生成随机密码的多种超实用实例,文中通过代码介绍的非常详细,需要的朋友可以参考下2024-05-05 这篇文章主要介绍了numpy之sum()的使用及说明,具有很好的参考价值,希望对大家有所帮助。如有错误或未考虑完全的地方,望不吝赐教2023-02-02
这篇文章主要介绍了numpy之sum()的使用及说明,具有很好的参考价值,希望对大家有所帮助。如有错误或未考虑完全的地方,望不吝赐教2023-02-02 这篇文章主要为大家介绍了python爬虫MeterSphere平台执行报告使用实战,有需要的朋友可以借鉴参考下,希望能够有所帮助,祝大家多多进步,早日升职加薪2023-12-12
这篇文章主要为大家介绍了python爬虫MeterSphere平台执行报告使用实战,有需要的朋友可以借鉴参考下,希望能够有所帮助,祝大家多多进步,早日升职加薪2023-12-12 今天小编就为大家分享一篇python bmp转换为jpg 并删除原图的方法,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧2018-10-10
今天小编就为大家分享一篇python bmp转换为jpg 并删除原图的方法,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧2018-10-10
解决Django中修改js css文件但浏览器无法及时与之改变的问题
今天小编就为大家分享一篇解决Django中修改js css文件但浏览器无法及时与之改变的问题,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧2019-08-08 这篇文章主要介绍了rabbitmq(中间消息代理)在python中的使用详解,小编觉得挺不错的,现在分享给大家,也给大家做个参考。一起跟随小编过来看看吧2017-12-12
这篇文章主要介绍了rabbitmq(中间消息代理)在python中的使用详解,小编觉得挺不错的,现在分享给大家,也给大家做个参考。一起跟随小编过来看看吧2017-12-12










最新评论